Questo è il driver del motore più semplice che potrebbe essere costruito utilizzando un solo transistor NPN, che è controllato e guidato dalla scheda micro controller ESP32.
Un motore DC (motore a corrente continua) è un dispositivo elettromeccanico estremamente diffuso nella automazione di fabbrica, nella robotica e nella elettronica di consumo. Riesce a convertire l’energia elettrica in energia meccanica ed è costituito da una combinazione di componenti elettrici e magnetici che consentono il movimento rotatorio.
Un motore a corrente continua è costituito da due componenti principali: Statore e Rotore. Lo statore è la parte fissa del motore ed è composto da un magnete permanente e da una serie di avvolgimenti di filo di rame, che creano un campo magnetico stazionario. Il rotore è la parte mobile del motore, anch’esso contiene degli di avvolgimenti (noti come avvolgimenti del rotore), che creano un campo magnetico aggiuntivo. La interazione tra i due campi magnetici di statore e rotore permette di creare il movimento di rotazione.
Materiali e componenti
- Microcontrollore ESP32
- Motore a corrente continua
- Transistor BC337
- Resistenza da 100Ω
- Diodo N4148
- connettori Dupont
- Breadboard
Collegamento del segnale
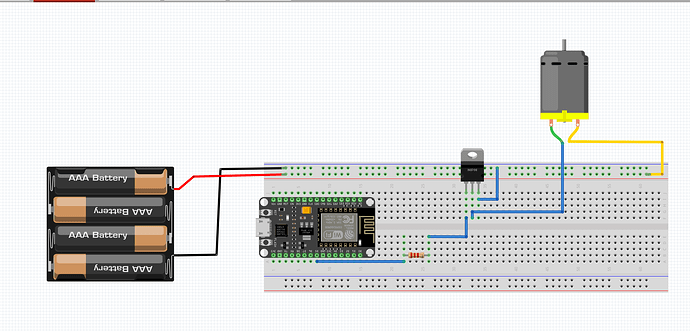
Collegare una resistenza da 100Ω al pin di base (centrale) del transistor NPN per proteggere la scheda EPS32 da sovratensione, quindi collegarla in serie a D5
La alimentazione
Collegare il pin del collettore (a destra) a terra. Collegare il perno dell’emettitore (a sinistra) al perno positivo del diodo per uso generale. Collegare il pin negativo del diodo general purpose a 3.3 V.
Il motore DC
Collegare il motore DC Collegare uno dei pin a entrambe le estremità del diodo. L’ordine non ha importanza, cambia solo la rotazione che è arbitraria e può essere codificata come alta attiva o bassa attiva. Nella immagine in basso il motore elettrico smontato, come si vede si tratta del solito motorino economico che troviamo in molti gadget e giocattoli.
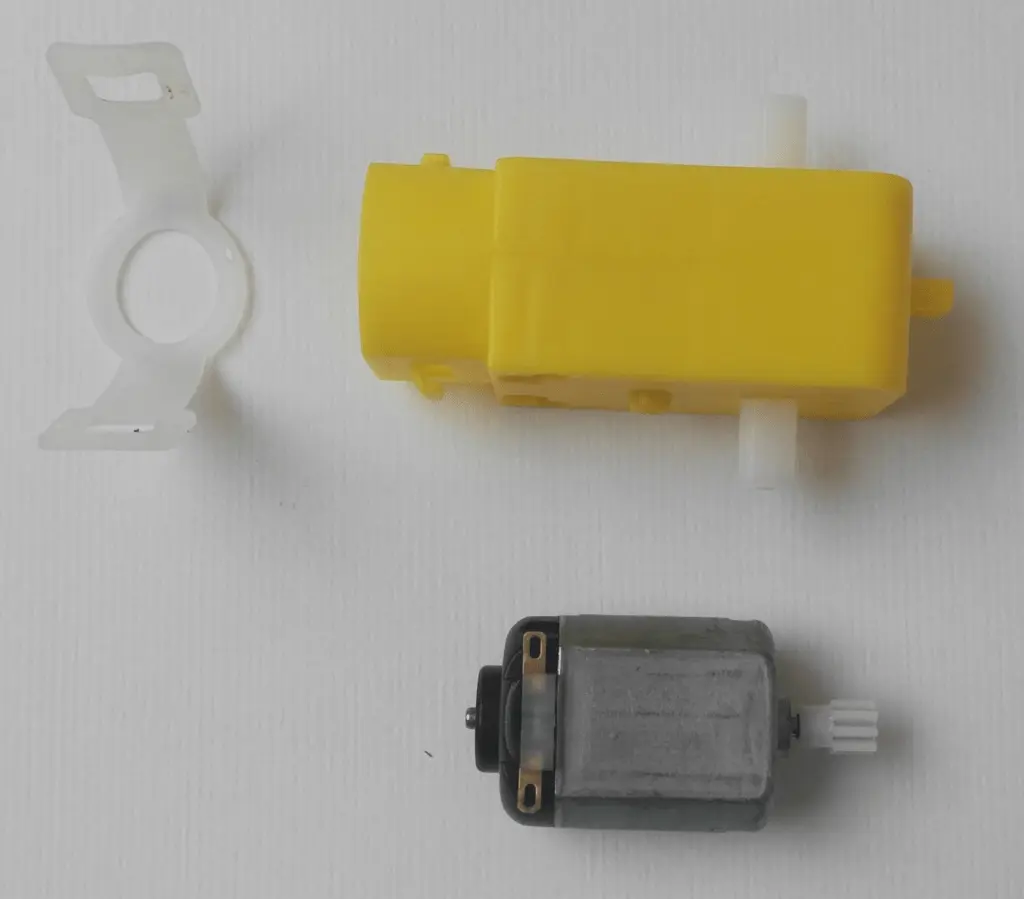
In questa immagine invece vediamo il motorino con il moltiplicatore collegato per aumentare la coppia e i due fili per il collegamento. La polarità dei due fili rosso e nero non ha particolare importanza nel nostro progettino didattico, ma per applicazioni più complesse si dovrebbe sempre fare attenzione alla polarità e al verso di rotazione.

Lo schema elettrico
Il programma
Scegliere ESP32 come la scheda sotto strumenti,e collegarlo. Scegli la porta USB corrispondente etichettata ESP32, quindi carica il seguente codice sulla scheda.
Il codice completo
const int motorPin = 5;
void setup()
{
pinMode(motorPin, OUTPUT);
}
void loop()
{
motorOnThenOff();
}
void motorOnThenOff()
{
int onTime = 3000;
int offTime = 3000;
digitalWrite(motorPin, HIGH);
delay(onTime);
digitalWrite(motorPin, LOW);
delay(offTime);
}
Robotdazero.it - post - R.160.1.2.0